This post walks through running an mrftools offline MR Fingerprinting (MRF) reconstruction end-to-end, entirely in Docker, using two repositories — python-ismrmrd-server (reconstruction server) and python-ismrmrd-client (data converter + streaming client) — plus a sample raw-data file provided separately (it’s not in either repo).
The workflow is the same for every mrftools recon — prostate, abdomen, brain, etc. Only four things change between them. This guide uses the prostate case as the worked example and then shows exactly what to swap for others.
- Worked example dataset:
meas_MID00758_FID33521_mrftools_prostate_yong.dat - Worked example recon:
mrftools_prostate_threaded(threaded, slice-by-slice)

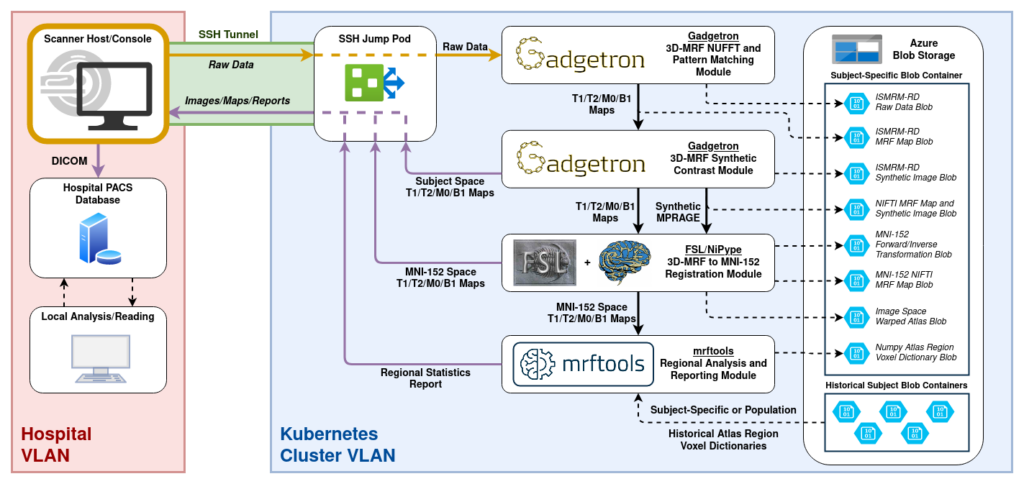
The pipeline:
.dat ──(siemens_to_ismrmrd)──► .h5 (MRD raw) ──(client → server recon)──► output .h5 (T1/T2/M0 maps) ──(h5tomat)──► .mat
This was run and verified end-to-end; the prostate maps below match the project’s known-good reference for this case to within floating-point rounding (correlation ≈ 0.99999999).

What you need
You have two git repositories and a sample data file. Put the repos somewhere together and keep your data somewhere of your choosing:
~/mrf/ # any working directory
├── python-ismrmrd-server/ # repo 1 — the recon server
└── python-ismrmrd-client/ # repo 2 — the converter + client
~/mrf-data/ # any data directory (provided separately)
└── meas_MID00758_FID33521_mrftools_prostate_yong.datTo keep the commands copy-pasteable, set two environment variables — your repo root and your data directory:
export REPOS=~/mrf # holds python-ismrmrd-server and python-ismrmrd-client
export DATA=~/mrf-data # holds the .dat, and will receive the .h5 outputsRaw data is always mounted in, never built into an image. The client’s
.dockerignoredeliberately excludes data, so you pass your.dat/.h5files into the containers at run time with-v "$DATA":/data. Nothing about your data needs to live inside either repo.
Prerequisites
- Docker (with
docker composev2). Verified with Docker 29.5. - NVIDIA GPU + nvidia-container-toolkit strongly recommended. The recon uses a NUFFT on the GPU (
torch+torchkbnufft). It falls back to CPU automatically, but a full multi-slice case takes seconds on GPU vs. many minutes on CPU. - ~10 GB free RAM and ~5 GB disk in
$DATAfor the intermediate MRD.h5(a typical input.datis ~2 GB; the converted MRD is similar). - The server image is large (~29 GB — it’s based on the NVIDIA PyTorch container).
Step 1 — Build the client image (converter + streaming client)
The client image bundles siemens_to_ismrmrd (Siemens .dat → MRD .h5) and the streaming client.py. It’s the same image for every recon.
docker build -t mrd-client "$REPOS/python-ismrmrd-client"This produces a small (~650 MB) image named mrd-client.
Step 2 — Build the reconstruction server image
The server image contains the mrftools reconstruction modules and PyTorch. One image serves all recon configs — you select which one at run time in Step 5.
cd "$REPOS/python-ismrmrd-server"
docker compose buildThis builds the image tagged python-ismrmrd-server-mrf-recon from docker/Dockerfile, using the build settings in docker-compose.yml. The build is long the first time (it compiles ISMRMRD + siemens_to_ismrmrd and pulls the NVIDIA PyTorch base).
GPU note: the provided
docker-compose.ymldoes not request a GPU. To run the recon on the GPU, start the server with the manualdocker runcommand in Step 4, Option B (which adds--gpus all).docker compose upworks too but runs on CPU.
Step 3 — Convert the Siemens .dat to MRD .h5
⚠️ The custom parameter map is required. mrftools MRF sequences store the image matrix size in vendor-specific header fields. With the default
siemens_to_ismrmrdstylesheet,reconSpace.matrixSize.xcomes out as 0 and the recon crashes withZeroDivisionError: float division by zero(the NUFFT grid size becomes 0×0). You must pass themrftoolsparameter map (-m) and stylesheet (-x), which are baked into the client image at/opt/code/python-ismrmrd-client/.
Run the converter inside the client container. Your data directory is mounted at /data, so the input .dat and the output .h5 both live in $DATA:
docker run --rm \
-v "$DATA":/data \
mrd-client \
siemens_to_ismrmrd \
-f /data/meas_MID00758_FID33521_mrftools_prostate_yong.dat \
-z 2 \
--skipSyncData \
-m /opt/code/python-ismrmrd-client/mrftools_parameter_map.xml \
-x /opt/code/python-ismrmrd-client/mrftools_brain_prod.xsl \
-o /data/meas_758.h5Flags:
| Flag | Meaning |
|---|---|
-f | input Siemens .dat file |
-z 2 | convert measurement 2 of this multi-RAID file (measurement 1 is calibration/AdjCoilSens; the MRF acquisition is the last measurement) |
--skipSyncData | skip PMU/waveform (ECG/resp) data — required for Siemens XA60 data to avoid a PMU-parsing bug in siemens_to_ismrmrd v1.2.6 |
-m … mrftools_parameter_map.xml | custom Siemens parameter map (populates the matrix size) |
-x … mrftools_brain_prod.xsl | custom stylesheet matching that parameter map (despite the “brain” name, this is the shared mrftools stylesheet) |
-o | output MRD .h5 |
You’ll see wrote scan : N progress, then warnings about “additional bytes at the end of file” — these are benign for this file.
Sanity-check the header (the recon needs a non-zero matrix size):
docker run --rm -v "$DATA":/data mrd-client python -c "
import h5py, ismrmrd
hdr = ismrmrd.xsd.CreateFromDocument(h5py.File('/data/meas_758.h5','r')['dataset/xml'][0])
e = hdr.encoding[0]
print('encodedSpace:', e.encodedSpace.matrixSize.x, e.encodedSpace.matrixSize.y, e.encodedSpace.matrixSize.z)
print('reconSpace: ', e.reconSpace.matrixSize.x, e.reconSpace.matrixSize.y, e.reconSpace.matrixSize.z)
"Expected (good) output for the prostate case:
encodedSpace: 256 256 1
reconSpace: 256 512 1If reconSpace shows 0 0 1, the custom map/stylesheet were not applied — re-check Step 3.
Step 4 — Start the reconstruction server
The server listens on TCP port 9002. On first run it auto-downloads the MRF dictionary and spiral trajectories for the requested recon from Azure and caches them in Docker volumes (dictionary-data, b1-data, debug-data), so subsequent runs are fast. The Azure connection string is baked into the image. The same server handles every recon config; you choose the config on the client side in Step 5.
Behavior is configured through environment variables in python-ismrmrd-server/.env (coil count, T1/T2 ranges, B1 correction, iteration count, etc.).
Option A — docker compose up (simplest, CPU)
cd "$REPOS/python-ismrmrd-server"
docker compose upBecause network_mode: host is set, port 9002 is exposed directly on your host. This runs the recon on CPU (the compose file requests no GPU).
Option B — manual docker run (recommended — enables GPU)
In a separate terminal, start the server with GPU access and the cache volumes mounted. (Override the entrypoint so we can pass -v for verbose logging.)
cd "$REPOS/python-ismrmrd-server"
docker run -d --name mrf-server \
--gpus all \
--network host \
--env-file .env \
-v python-ismrmrd-server_dictionary-data:/usr/share/dictionary-data \
-v python-ismrmrd-server_b1-data:/usr/share/b1-data \
-v python-ismrmrd-server_debug-data:/usr/share/debug \
--entrypoint python3 \
python-ismrmrd-server-mrf-recon \
/opt/code/python-ismrmrd-server/main.py -v -H=0.0.0.0 -p=9002Confirm it is listening:
docker logs mrf-server --tail 5
# ... Starting server and listening for data at 0.0.0.0:9002
# ... Serving...The volume names
python-ismrmrd-server_*are the onesdocker composecreates. If you never rancompose, Docker will create fresh empty volumes here and the first recon will download the dictionary from Azure (~170 MB for prostate).
Step 5 — Run the reconstruction (client → server)
With the server running, stream the converted MRD file to it. The -c <config> flag selects the recon module by name (the server imports the matching <config>.py). For the prostate example that is mrftools_prostate_threaded.
docker run --rm \
--network host \
-v "$DATA":/data \
mrd-client \
python client.py \
-a localhost -p 9002 \
-c mrftools_prostate_threaded \
-o /data/output_758.h5 \
/data/meas_758.h5Flags: -a/-p server address/port, -c server-side config (recon module) name, -o output file, last positional arg is the input MRD file.
The client streams ~13,800 acquisitions; the server reconstructs slice-by-slice and streams images back. On a successful run the client prints a summary like:
Sent 13824 acquisitions | Received 0 acquisitions
Sent 0 images | Received 24 images
Session complete24 images = 8 slices × 3 parameter maps (T1, T2, M0). (Image and slice counts vary by dataset/recon.) Watch the server side with docker logs -f mrf-server to see per-slice progress. The result is $DATA/output_758.h5.
Step 6 — Convert the output to MATLAB .mat (optional)
h5tomat.py (shipped in the client repo) repackages the parameter maps into a MATLAB-friendly .mat:
docker run --rm \
-v "$DATA":/data \
mrd-client \
python h5tomat.py /data/output_758.h5Produces $DATA/output_758.mat with datasets t1big_all, t2big_all, m0big_all (each [n_slices, rows, cols] float64), loadable in MATLAB via load('output_758.mat').
If your
mrd-clientimage predatesh5tomat.pybeing added to the Dockerfile, mount the repo’s copy in:-v "$REPOS/python-ismrmrd-client/h5tomat.py":/opt/code/python-ismrmrd-client/h5tomat.py:ro
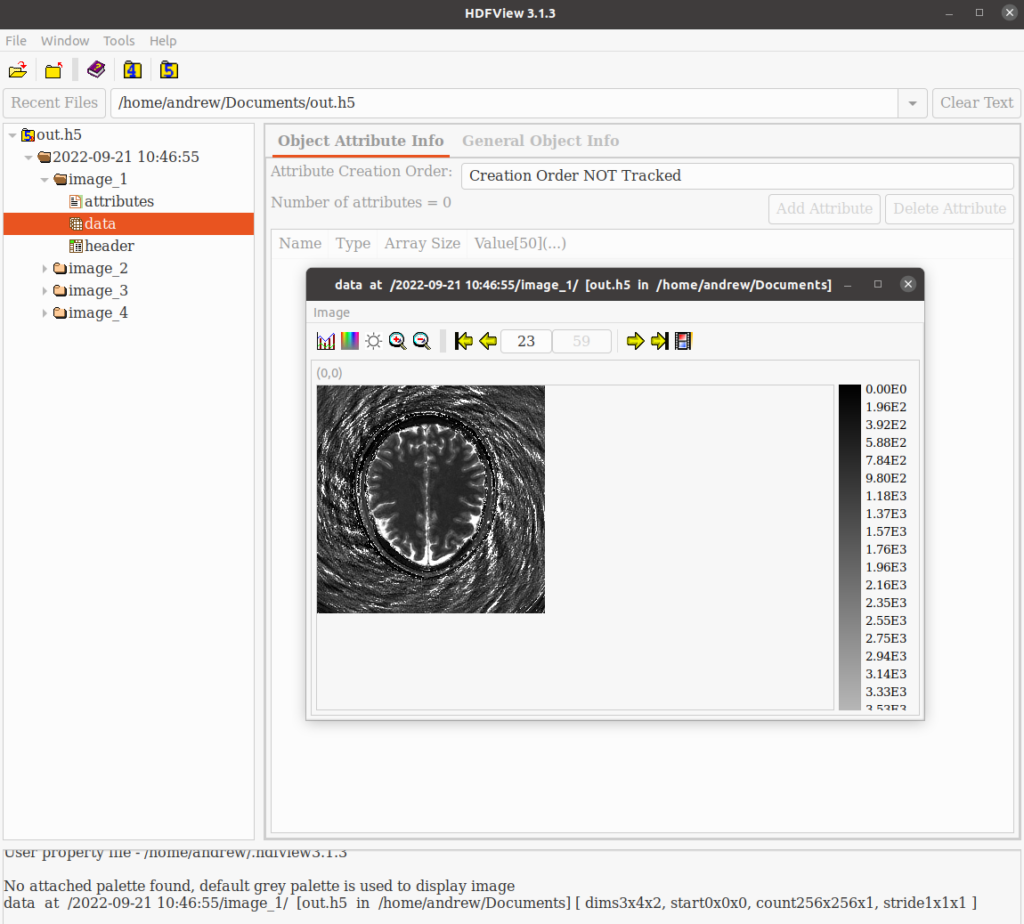
Step 7 — View the results (on the host, not Docker)
The viewer scripts in the client repo use a GUI and run on the host. They need matplotlib, numpy, h5py (and scipy for .mat):
cd "$REPOS/python-ismrmrd-client"
python view_images.py "$DATA/output_758.h5" # MRD image viewer
python view_maps.py "$DATA/output_758.mat" # parameter-map viewerview_images.py controls: ←/→ timepoint, ↑/↓ slice, +/- channel, r color range, q quit. The T1/T2/M0 montage near the top of this post was produced from output_758.h5 this way.
Adapting to other mrftools reconstructions
The steps above are identical for every mrftools recon. To run a different case, change only these four things:
| What changes | Where | Prostate example | How to find it |
|---|---|---|---|
| 1. Input dataset | Step 3 -f | ..._prostate_yong.dat | the .dat for your anatomy (e.g. ..._abdomen_...dat) |
| 2. Measurement number | Step 3 -z N | -z 2 | the last measurement in the multi-RAID file (try -z 1, -z 2, … or -Z to dump all). Measurement 1 is usually calibration. |
| 3. Recon config name | Step 5 -c <config> | mrftools_prostate_threaded | the server-side module name for that recon (matches a <config>.py in the server repo) |
| 4. Trajectory / FOV / dictionary | automatic | FOV 400, 256², spiral | nothing to do — the recon reads FOV/matrix from the MRD header and picks the matching trajectory + dictionary itself |
Everything else — the custom -m/-x conversion maps, --skipSyncData, the server launch, the dictionary/trajectory auto-download and caching, h5tomat.py, and the viewers — is shared.
The custom stylesheet is named
mrftools_brain_prod.xslfor historical reasons but is the shared mrftools parameter stylesheet — use it for prostate, abdomen, brain, etc.
Adding a new reconstruction config to the server
A “config” is nothing more than a Python module in python-ismrmrd-server/ that exposes a process() function. When the client connects with -c <name>, the server runs importlib.import_module("<name>") and calls its process(). So adding a recon = dropping in a <name>.py file in the server repo. No registration, no edits to server.py.
1. Write the module
Create python-ismrmrd-server/myrecon.py. The minimal contract is a process() function that reads from the connection and sends images back. This example does a basic Cartesian FFT recon and is a good starting template:
import ismrmrd
import logging
import numpy as np
import numpy.fft as fft
import mrdhelper
def process(connection, config, metadata):
logging.info("myrecon: starting (config='%s')", config)
# Collect raw k-space acquisitions; ignore other message types.
acqs = [item for item in connection if isinstance(item, ismrmrd.Acquisition)]
if not acqs:
connection.send_close()
return
logging.info("myrecon: received %d acquisitions", len(acqs))
# Sort readouts into a Cartesian grid: [coils, ky, kx].
ncoils = acqs[0].data.shape[0]
nx = max(acq.data.shape[1] for acq in acqs)
ny = max(acq.idx.kspace_encode_step_1 for acq in acqs) + 1
kspace = np.zeros((ncoils, ny, nx), dtype=np.complex64)
for acq in acqs:
ky = acq.idx.kspace_encode_step_1
kspace[:, ky, :acq.data.shape[1]] = acq.data
# 2D inverse FFT + sum-of-squares coil combine, normalize to int16.
img = fft.fftshift(fft.ifft2(fft.ifftshift(kspace, axes=(1, 2)), axes=(1, 2)), axes=(1, 2))
img = np.sqrt(np.sum(np.abs(img) ** 2, axis=0))
img = (img * (32767.0 / img.max())).astype(np.int16)
# Wrap as an MRD image (copies orientation from the acquisition) and send it back.
mrd_img = ismrmrd.Image.from_array(img, acquisition=acqs[0])
mrd_img.image_index = 0
connection.send_image(mrd_img)
connection.send_close()Notes:
- The function must be named
processand accept(connection, config, metadata). The server first tries to call it with an extraversion=keyword and silently falls back to this 3-argument form, so the signature above is fine. connectionis an iterator of incoming MRD messages — filter for the types you want (ismrmrd.Acquisitionfor raw k-space,ismrmrd.Imagefor image input).- Send results with
connection.send_image(...)and finish withconnection.send_close(). invertcontrast.pyandmrftools_prostate_threaded.pyin the server repo are fuller references to copy from.
2. Test it without rebuilding (fast dev loop)
The server calls importlib.reload() on each connection, so if you mount the server repo as a volume, you can edit the module and re-run the client without restarting the server or rebuilding the image.
Start a dev server with the repo bind-mounted over the baked-in code:
cd "$REPOS/python-ismrmrd-server"
docker run -d --name mrf-server-dev \
--gpus all --network host --env-file .env \
-v "$(pwd)":/opt/code/python-ismrmrd-server \
-v python-ismrmrd-server_dictionary-data:/usr/share/dictionary-data \
--entrypoint python3 \
python-ismrmrd-server-mrf-recon \
/opt/code/python-ismrmrd-server/main.py -v -H=0.0.0.0 -p=9002Send some MRD data through your new config (any converted .h5 in $DATA works):
docker run --rm --network host \
-v "$DATA":/data \
mrd-client \
python client.py -a localhost -p 9002 -c myrecon \
-o /data/myrecon_out.h5 /data/meas_758.h5On success the client reports Received 1 images (or however many your process() sends) and the server log shows your logging.info lines. Edit myrecon.py, re-run the client — the change is picked up immediately, no restart needed. Watch the server with docker logs -f mrf-server-dev; any exception in process() appears there (and the client sees a BrokenPipeError).
3. Bake it into the image (permanent)
Once the module works, rebuild so it’s baked into the image (the Dockerfile’s COPY . /opt/code/python-ismrmrd-server picks up every .py in the repo — no Dockerfile edit needed):
cd "$REPOS/python-ismrmrd-server"
docker rm -f mrf-server-dev # stop the dev server
docker compose build # rebake the image with myrecon.py insideNow the production server (Step 4) serves -c myrecon with no volume mount.
Clean up
docker rm -f mrf-server # if started via Option B
# or, if started via compose:
cd "$REPOS/python-ismrmrd-server" && docker compose down
# The ~2 GB intermediate MRD file can be deleted; outputs are small.
rm "$DATA/meas_758.h5"Cached dictionary/trajectory data persists in the Docker volumes for fast future runs. Remove with docker volume rm if you want a clean slate.
Troubleshooting
| Symptom | Cause / fix |
|---|---|
ZeroDivisionError: float division by zero in the server, after Override Matrix Size: [0 0 N] | The MRD header has matrixSize.x = 0. You converted without the custom -m/-x maps. Redo Step 3 with mrftools_parameter_map.xml + mrftools_brain_prod.xsl. |
Unknown config '<name>'. Falling back to 'invertcontrast' | The -c config name doesn’t match a recon module on the server. Check the module exists in the server repo and the spelling matches. |
BrokenPipeError / Failed to send acquisition N on the client | The server-side recon crashed mid-stream. Check docker logs mrf-server for the real traceback. |
| Recon is extremely slow | Running on CPU. Use Step 4 Option B with --gpus all, and verify with nvidia-smi -L. |
AZ_CONNECTION_STRING not set in server logs | The dictionary download needs the Azure string. The image bakes it in; if you overrode the env, re-add it or pre-seed the dictionary-data volume. |
Connection refused from the client | Server not up yet, or not on port 9002. Confirm docker logs mrf-server shows “Serving…” and both containers use --network host. |
| Converter warns about “additional bytes at the end of file” | Benign for these datasets — conversion still succeeds. |